���A��W���Ô��ֹ�̎����DLP��3D��ӡ���g�_�l��ܴ���ܛ�w�C����
2025��4��29�գ����A��W���о��ˆT�_�l��һ�N���M�Ĕ��ֹ�̎����DLP��3D��ӡ���g��ԓ���g�܉�һ����������ɲ�ͬ���Ϙ��ɵďͺϴ��ԽY�������⣬����߀�����@헼��g�ɹ��OӋ����ӡ��һ����Ӳ�Ų��Ϻͳ�혴Ų�����һ�w��ܛ�w�C���ˡ�

������S�����S�ŽY���ķ�����N���ӡ�Ȼ�������y��ˇ��ģ���o�����ͺ�������������ģ���Π�Ͳ�����ͣ��y��������s�ŽY�����@Щ����ͨ��Ҫ��Y���ɷ־���ʹ��ʹ�ö�N���������ܴŽY��׃�Ï��s���M�ܶಽ�M�b�Ͳ����I�ϼ��g�܉�ͬ���ϽM�����ڸ��N���ã��������ڴ_������Y���ijߴ緶���;��ȷ����������
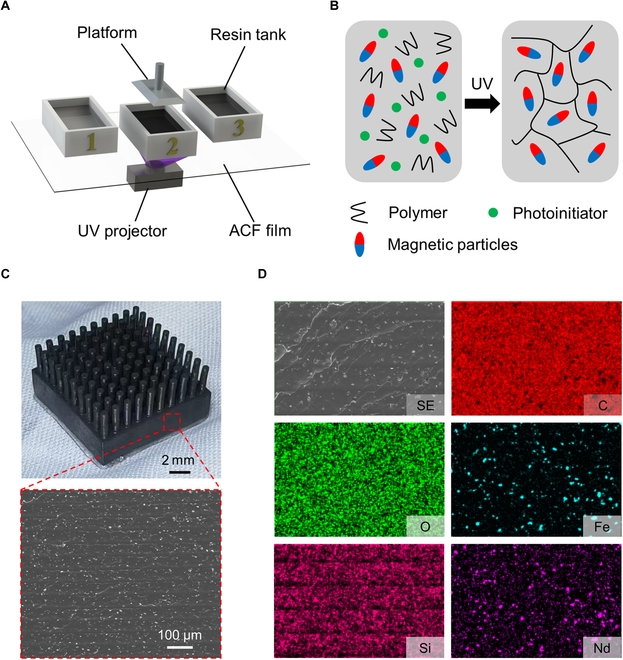
���A��W�����ҵ�������������M�Ĕ��ֹ�̎�����g��ԓ���g�܉��چδδ�ӡ�^����������ɲ�ͬ���ϽM�ɵďͺϴ��ԽY���������@헼��g�������ڵĈF꠳ɹ������˶�N�ͺϽY������������ܛӲ���Ϗͺ��w�����в�ͬ�ŝ���ݶȵďͺϲ��ϣ��Լ�Ӳ��-��혴ŏͺϲ��ϡ�
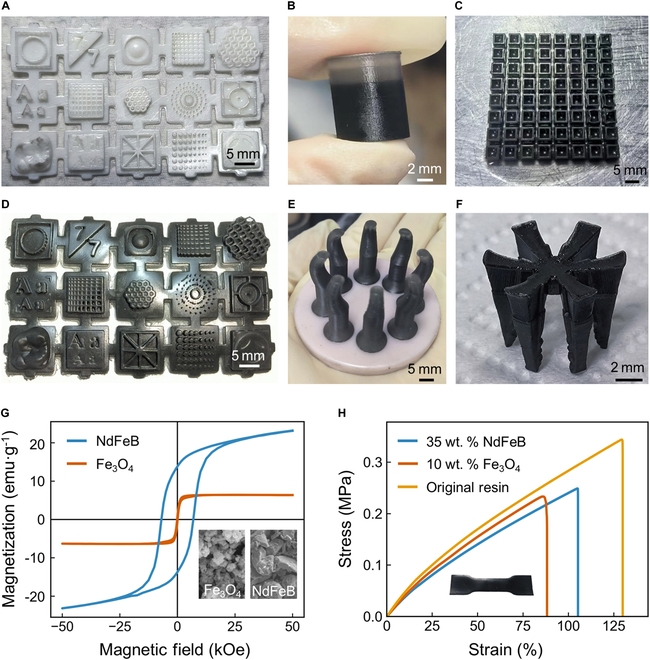
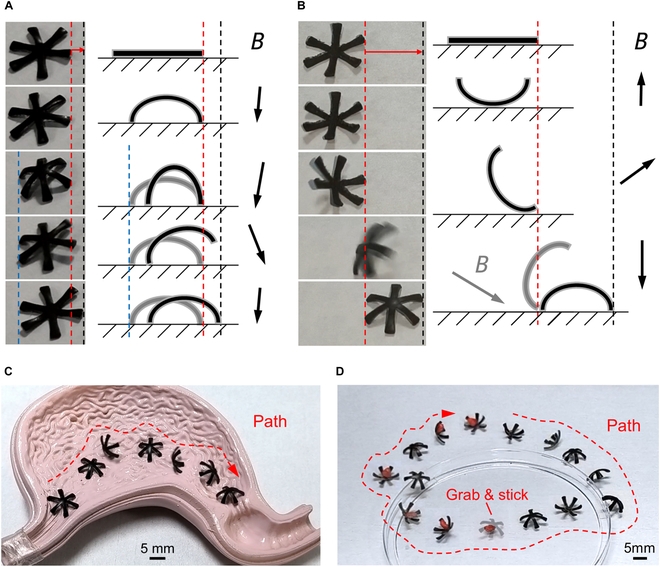
�������Mһ����ጵ����@��о���B�˴���ܛ�w�C���˵�һ���Զ����3D��ӡ���¸���ͼ��gԭ�����о����ݺ��w�˴�ӡ�Y���ęCе�ʹ����ԣ���չʾ�ˎׂ�����ʾ�����о��F�߀Ԕ��̽ӑ����Ӳ�źͳ�혴Ų��Ϙ��ɵ�ܛ�w�C���˵��OӋ����C�����c�о��˴Ů��ֲ��ͳ�혴Ų��ϵğ�Ч���������u���˙C�����ڱ����Ƅӡ��˷��ϵK�����@���\ݔ���w��������Һ�w�h������Ӿ����������ͨ�^���������Ϸ����������������Ӿ�˄ݡ�
���A��W���о��ˆTָ������Q�ˏ����ԽY���c�x��Ĥ֮�g��ճ�����}���̻���Ȝp���Լ��������ӳ����Ȇ��}����ͨ�^���������Ԝyԇ��ԓ���g��K�������OӋ�܉�ˎ��ֱ��ݔ�͵�����M���Ȃ��ڲ�λ���z�ҙC���ˡ�
���о��õ�������Ȼ�ƌW�����Ŀ��NSFC���Y�����Ŀ��̖��52275200 �� 52205312��
(؟�ξ���admin)

 ��J֪�������ˆT�_�l��
��J֪�������ˆT�_�l�� ����������ٹ�ֲ���w�ڱ�
����������ٹ�ֲ���w�ڱ� ATI�����¹��S��������
ATI�����¹��S�������� ������֧��W������3D��ӡ
������֧��W������3D��ӡ ���X�Ƶ��{��������3D��
���X�Ƶ��{��������3D��- ����J֪�������ˆT�_�l��������r���s
- �����A��W���Ô��ֹ�̎����DLP��3D��ӡ
- ������������ٹ�ֲ���w�ڱ�����Է����
- ��ATI�����¹��S�������������������
- ��������֧��W������3D��ӡ�Ƃ书���ԃ�
- �����X�Ƶ��{��������3D��ӡ���g�����
- ��Nature�ӿ����з��_���_��Wͻ��̼3D��
- ��ͨ�^�䇊Ϳ�������죬���F���F��/ĸ��
- �����F���ٹ����a���c�Cе�������ί�����
- ����˹�D��W�_�l���������t�W�ͺ��պ���
 3D�����ӡ������
3D�����ӡ������ ��Small Science
��Small Science ��������-�����
��������-����� ���A��W��������
���A��W�������� ��Science����һ
��Science����һ ���a��ߴ��մ�3D
���a��ߴ��մ�3D- ���������ӌW����ܵ���������TC4��ˇ��
- ���p���Ӿۺϡ��߾��������I��ġ����ǡ�
- ��3D��ӡ����Y���OӋ�K�Oָ�ϣ������p��
- ���C���������·���3D��ӡ���g
- ���B�m�����̼��g����ͻ�ƣ�Carbon����
- ��3D�����ӡ���g����������ٹ����е���
- ���u݆�~Ƭ�����������������ޏͼ��g����
- ��3D��ӡ�C���g���ƴ��FDM��SLA��CLIP��
- ���Gɫ�ְ�ȫ��3D��ӡ�zԭˮ���z���IJ���
- ��⁏��ˣ��K����3D��ӡ⁺Ͻ��q朣��b��


