���������_�l(f��)�����ƄәC���˵�3D��ӡ�������Y(ji��)��(g��u)ϵ�y(t��ng)
����ȱ���Ƅ��Ժ��w�eС�Ȇ��}�������ˌ�3D��ӡ�����IJ��ã�����ͬ���ƄәC���˵�ʹ�����_ʼ��Q����s�Ԇ��}�ĺõط������ǬF(xi��n)�ڣ�Cuong���ڼ���F����ڌ����������µĸ߶ȡ�����?n��i)���ʹ���ƄәC�����M��߅��߅��ӡ�ķ������������_�l(f��)��һ���ΙC���˹��I(y��)��������ƽ�_�������dzɌ�ϵ�y(t��ng)��ԓƽ�_����������ɴ�Ҏ(gu��)ģ�Ľ�����ӡ�����҂���ϵ�y(t��ng)���b���ƄәC�����ϡ��܉���̫�����ƄәC���˻���������ʹ�҂��ęC���˿��Դ�ӡ����������ĽY(ji��)��(g��u)���� Cuong���ڽ���f�� �����⣬���п��Ƅӵĵ���߀���Ը��p�ɵ،��C���ˎ���ʩ���F(xi��n)�����ڃ�(n��i)���Ƅӡ���
��(j��)�Ї�3D��ӡ�W(w��ng)�˽⣬�����͘�(g��u)������ѳɞ�C���˼��g(sh��)�ļ������ĵđ�(y��ng)���I(l��ng)���e�ǣ������䷽�͙C���˼��g(sh��)�Ŀ����M��ʹ�C���˵�3D��ӡ�������ɞ�F(xi��n)��ʩ������ϣ���ļ��g(sh��)��Ȼ�����ɔUչ����Ȼ�ǏV�����õ���Ҫ�ϵK����ӡϵ�y(t��ng)���������Tʽ����ڱ�ʽ��ͨ����Ҫ��ӡ�ĽY(ji��)��(g��u)Ҫ��ö࣬��˺��韩����������������һ�N�ƄӴ�ӡϵ�y(t��ng)��һ�N���b���Ƅӻ����ϵęCе�֣��������@һ���}��ͨ�^�Ƅӻ������@�ӵ�ϵ�y(t��ng)���Դ�ӡ��������������ĽY(ji��)��(g��u)��Ȼ���������ϵ�y(t��ng)ֻ�����oֹ�r��ӡ���Ķ������Ԇδδ�ӡ�ĽY(ji��)��(g��u)�ijߴ�ʩ�������ơ����@��҂��_�l(f��)��һ�����F(xi��n)�ƄӴ�ӡ������ϵ�y(t��ng)��ԓϵ�y(t��ng)������һ���C���˴�ӡ�����С�Ćμ��Y(ji��)��(g��u)���@�N�l(f��)չ��Ҫ��Qᘌ��Ƅ�3D��ӡ���\��Ӌ�������ػ����\�ӿ��Ɔ��}��ԓϵ�y(t��ng)ֻ��Ҫһ���C���˼��ɴ�ӡ��ͬ��С�Ćμ��Y(ji��)��(g��u)���@Ҳ�����ڴ_�����õĽY(ji��)��(g��u)���ܡ�
")
�ƄәC����3D��ӡϵ�y(t��ng)
ͨ�����o����ӡ�Ƚ���3D��ӡϵ�y(t��ng)�����T������x���Ľ������ϡ���������ӡ�Y(ji��)��(g��u)�ijߴ��ܵ��������֮һ�����ƣ��Cе�۵ķ������T�ܵ������w�e��ʹ��ӡ�^�܉����ض��S�ƄӵĿ�ܡ����ǣ�NTU�о��ˆTͨ�^�����I(y��)�C���˲ٿv�����b����݆�����ϣ�ʹ������ϵ�y(t��ng)�������κη������Ƅӣ�ֻҪ����ƽ̹�ı����ϼ��ɡ�Ȼ��ʹ��ܛ�܌�ƽ�_�ęCе�ַ��m�����B�ӵ��á�
���ˌ��F(xi��n)�f(xi��)�{(di��o)һ�µĹ���������ϵ�y(t��ng)�о���Ӌ���˙C���˲ٿv�����\���Լ��Ƅ�ƽ�_���\�ӡ���ʹ�÷����\�ӿ��ƺ߶Ⱦ��_�ęC���˶�λ���Դ_�����������_���ٶ������_��λ�ó��e���������ϡ�ͨ�^�����C�������Ƅӵ����ı��棬�䡰��λϵ�y(t��ng)���ڸ���ı���e��Ч�����á�
�O(sh��)�úʹ�ӡ���̹ܵ�ģ��")
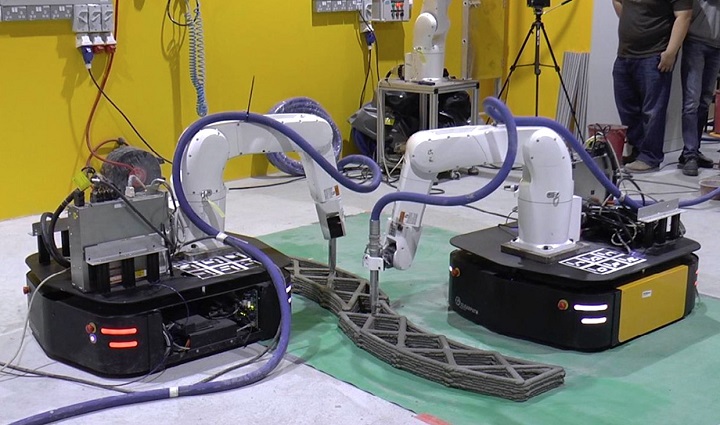
�ϴ�3D��ӡϵ�y(t��ng)�O(sh��)�úʹ�ӡ���̹ܵ�ģ��
NTU�о�С�M�Q��������߅��߅��ӡϵ�y(t��ng)��������һ���C���˿�������ĽY(ji��)��(g��u)�ijߴ硣�����C���@һ�c������ʹ��ԓƽ�_3D��ӡ210 x 45 x 10���Ć��w�������Y(ji��)��(g��u)��ԓ�Y(ji��)��(g��u)�϶��șCе�۵�87������ԓϵ�y(t��ng)�����@�����ʩ��3D��ӡ��Ч�ʡ����ǣ������Ĺ�����δ��ɣ����ԓϵ�y(t��ng)��Ȼ����һЩ�����ԣ��e���ڹ����^(q��)�����档 Cuong���ڽ���f�����҂���Ӌ�����҂��ęC�������Ӆf(xi��)�����ܡ��@�������뷨�������ˆT���������C���ˣ�Ȼ�����ؽ���������������λ�ã�������(d��o)�����F(xi��n)�߾��ȽM�b����
NTUС�M��Mehmet Efe Tiryaki��Xu Zhang��Cuong���ڽM�ɣ��l(f��)�������P(gu��n)����ϵ�y(t��ng)��Փ�ģ���(bi��o)�}�顰�ƄӴ�ӡ�����͙C����3D��ӡ���·�������
�Ї�3D��ӡ�W(w��ng)���g���£�
(؟(z��)�ξ���admin)

��һƪ��AI�(q��)�ӣ��Ƅ��`�Luyten 3D�Ƴ�����Platypus X12������3D��ӡ�C
 COBOD�l(f��)����һ������3D��
COBOD�l(f��)����һ������3D�� RIC�Ƴ����ͱ�yģ�K����
RIC�Ƴ����ͱ�yģ�K���� �մ��~˹���Ƴ� KARLOS��
�մ��~˹���Ƴ� KARLOS�� ���±������КW������3D
���±������КW������3D �A��(chu��ng)�Ƴ�12��12��12�בұ�
�A��(chu��ng)�Ƴ�12��12��12�בұ� ���{��W(xu��)�l(f��)�����ͣ�15��
���{��W(xu��)�l(f��)�����ͣ�15��
- ��COBOD�l(f��)����һ������3D��ӡ�CBOD3
- ��RIC�Ƴ����ͱ�yģ�K��������3D��ӡ�C
- ���մ��~˹���Ƴ� KARLOS��һ�����ڽ���
- �����±������КW������3D��ӡ������ʹ
- ���A��(chu��ng)�Ƴ�12��12��12�בұ�ʽ����3D��ӡ
- �����{��W(xu��)�l(f��)�����ͣ�15����������3D��
- ��AI�(q��)�ӣ��Ƅ��`�Luyten 3D�Ƴ�����P
- �����������_�l(f��)�����ƄәC���˵�3D��ӡ��
- ��COBOD�l(f��)����һ������3D��ӡ�CBOD3
- ��RIC�Ƴ����ͱ�yģ�K��������3D��ӡ�C
- ���մ��~˹���Ƴ� KARLOS��һ�����ڽ���
- �����±������КW������3D��ӡ������ʹ
- ���A��(chu��ng)�Ƴ�12��12��12�בұ�ʽ����3D��ӡ
- �����{��W(xu��)�l(f��)�����ͣ�15����������3D��
- ��AI�(q��)�ӣ��Ƅ��`�Luyten 3D�Ƴ�����P
- �����������_�l(f��)�����ƄәC���˵�3D��ӡ��
- �����Ƅӡ��F(xi��n)����ӡ��������˹�D���аl(f��)��
- ���������g(sh��)��W(xu��)��ُCOBOD����3D��ӡ�C��
 ���������_�l(f��)����
���������_�l(f��)���� �������g(sh��)��W(xu��)��ُ
�������g(sh��)��W(xu��)��ُ ���������Ľ���
���������Ľ��� ICON�Ƴ�����Vulc
ICON�Ƴ�����Vulc WASP�l(f��)�����ڽ���
WASP�l(f��)�����ڽ���- ��˹�����၆����3D��ӡ�Cչʾ����������
- �����mCyBe Construction��˾�_�l(f��)���Ƅ�
- �����ͽ���3D��ӡ�C������ˮ�࣬߀�ܴ�ճ
- ��ƽ��3D��ӡ���ݲ����lj�������3D��ӡ�C
- ��BetAbram��˾����3D��ӡ�C��ʽ�_�u���s
- �������W(xu��)���ý���3D��ӡ�C24С�r�����˾�
- �����������Ľ���3D��ӡ�C����2019���M
- ��������һ��������Contour Crafting�_ʼ
- ��ICON�Ƴ�����Vulcan II 3D��ӡ�C������
- ������3D��ӡ�C�٬F(xi��n)��3Dɳ����ӡ�C


