�Ї��W�߰l��3D��ӡ����Nautre������ģ�K�������ۼ�������
���ۼ��У�һ�������ԳʬF���Ĵ���B�����S�����ܵ��Π�@ȡ�Q�������ۯB��ʽ�����ۼ���ԭ�푪���ڲ����OӋ���t�����_�l̎�����������|�ij����ϡ�
�Cе�������Ǿ�����������еĺ��^�Y�����ܮa�������������W���ܺ�׃��ģʽ�����Գ����ϿɌ��F��׃�cŤ�D����ϵ�����׃��Ч�������F�г����ϴ����p�\����ϡ��o������������׃�����ޣ���׃≤2%���Ȇ��}����������˹�D��W�� Glaucio H. Paulino ���ڈF���������ģ�K�����Գ����ϣ�����Ûƽ���Ƕ�����ۼ����l��������нM�ɣ����F�˽����ӡ��@�N�Y�����Ա��F����Ȼ���в����ڵ�푑��������ډ��s�r��Ť������Ť���r�����s���@�N�OӋ���������������ڸ��N���õIJ��ϣ��������{�����C���˺Ͱ��b�����P������ “Modular chiral origami metamaterials” ���}�l���ڡ�Nature���ϡ�

�@��о��ĵ�һ���ߞ��Ї��W���w�أ��䱾�ƾ��x�ڴ��B������W���F������˹�D��W��ʿ���о��T��
�о��˘˜ʏ��Բ��ϡ�������Ť�D�����Ϻͱ��ij����ϵ�׃�ΙC�ƣ��Y�����������������ij����Ͼ��Ъ��صĶ�ģ�B׃�ΙC�ƣ����ڃɷN�����ӗl����׃�Ρ�
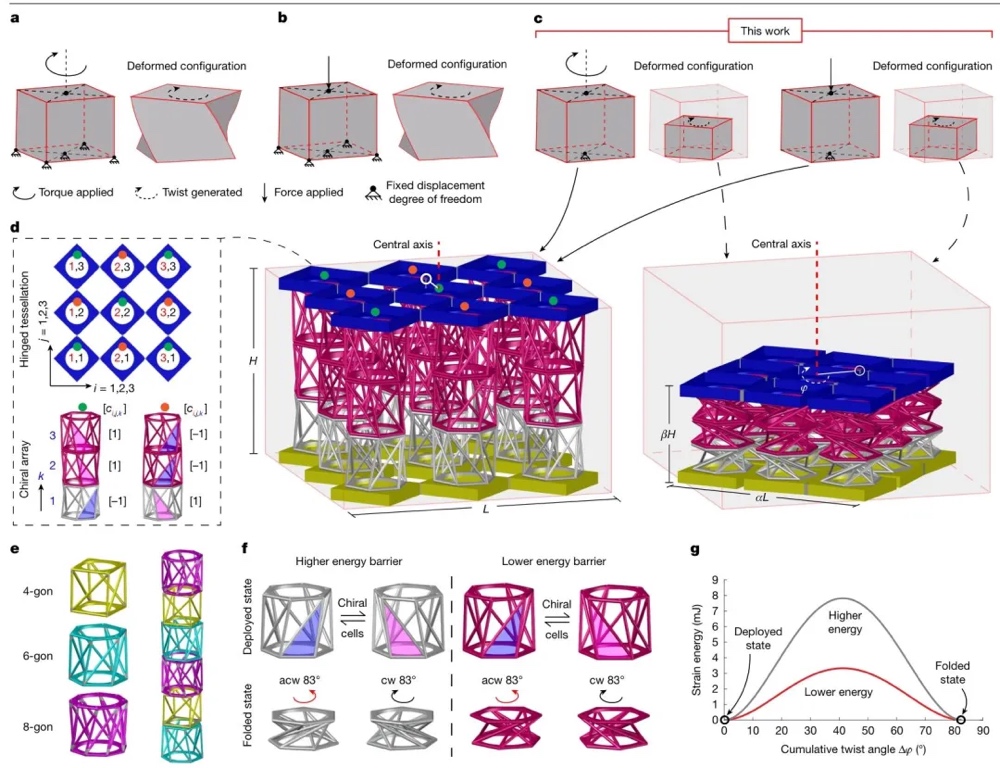
�о��˳����������D���µ�׃���О飬�Y��������Փ���^�õ��A�y�����ϵ���Ⱥ�����׃�Ρ�

�о��˳������ھ���λ�����µ�׃�Σ��Y��������ͬ߅��l����ʹ�����ϳʬF��ͬ�Ķ�ģ�B׃���О顣
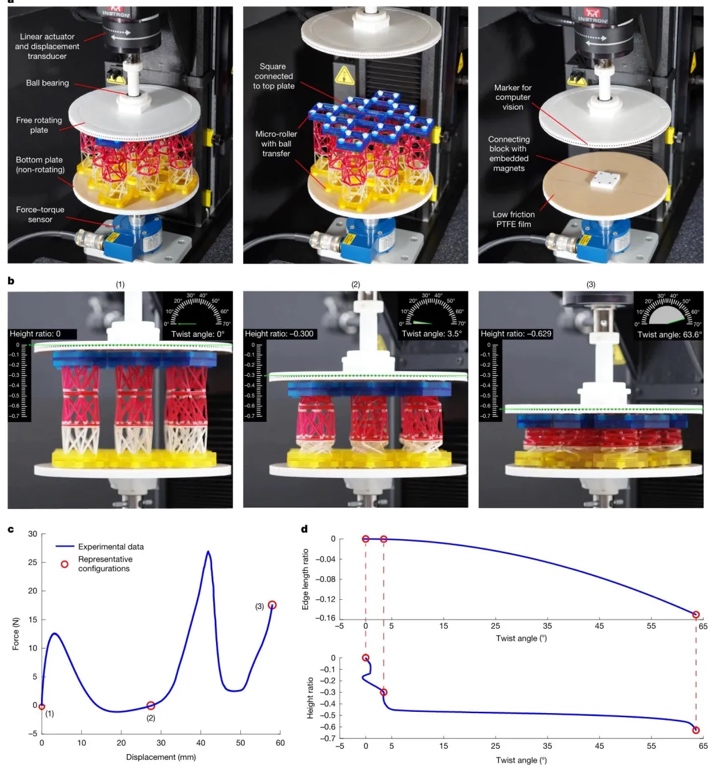
ͨ�^�������ģ���M��ģ�M���о��������о��˳�������Ť�D�͉��s�d���µ�׃�Σ��Y������ģ�M�Y���c���Y�������

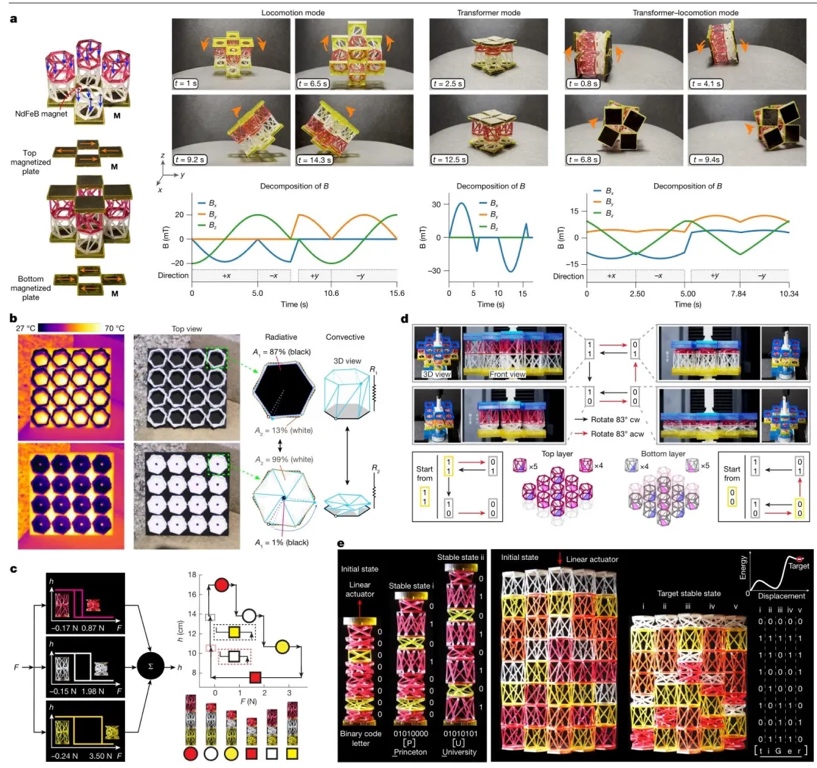
ͨ�^�OӋ�M�bҎ�t�о��˳����ϵĿ��ؘ��ԣ��Y��������ͨ�^�x��ͬ�M�bҎ�t�����¾��̳����ϵ����W���ܡ�

���Ę����ij������ڙC���ˡ����{������Ϣ�惦���I���Н��ڑ��á�
�о��YՓ
���о�̽����ģ�K�����Գ����ϣ����چ����ɶ����¿Ɍ��FŤ�D���տs�߶�׃��������ģ�B׃�Ρ���ģ�B׃���c Kresling �D���ķDŽ����ۼ��О鼰�����ۼ���ģ�K�����P��ԓ��ģ�K��ϵ�y�Ɍ��F���ؘ��ව���ԡ����{ؓ�d�������ɔUչ�ԺͶ���������ɡ��о��ɹ������ڽ�ʾ���{���ȑ��á��UጙCе�������Փ��߀����չ��W���о����������C���˵İ��辎�̽M�b׃�κ������{�ء�
����Դ��https://doi.org/10.1038/s41586-025-08851-0
(؟�ξ���admin)

��һƪ���Aʢ�D��W�_�l�ɽ���3D��ӡ�������ϣ�������B�¸��Թ�
 �Aʢ�D��W�_�l�ɽ���3D��
�Aʢ�D��W�_�l�ɽ���3D��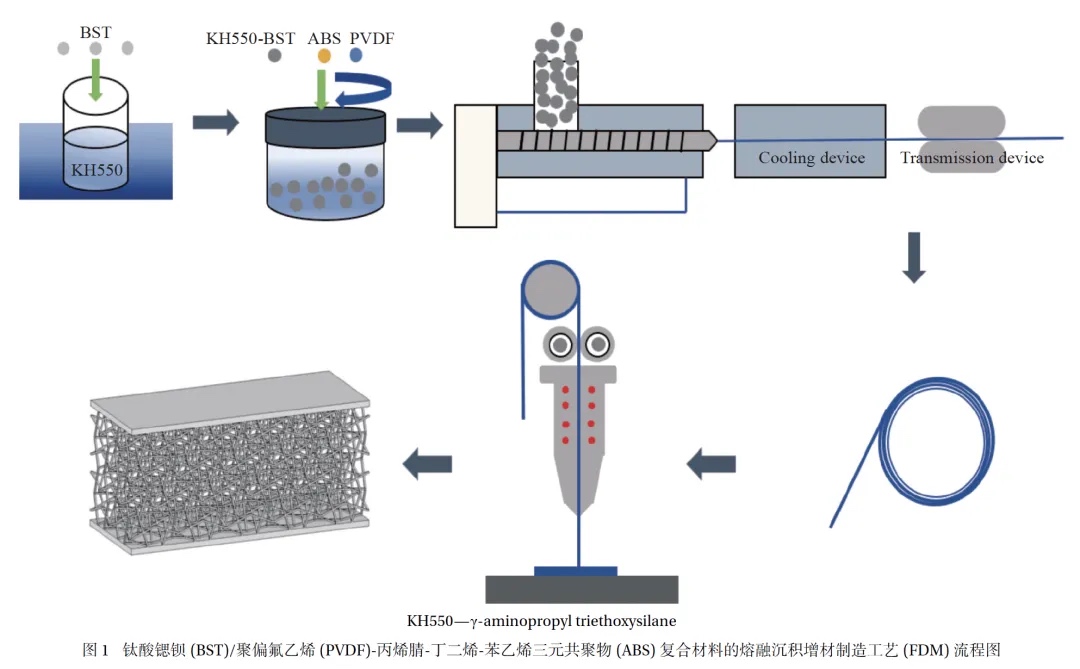 �������I��W�߷���ڣ�FD
�������I��W�߷���ڣ�FD 3D��ӡ�ͺϲ�������ƿ�i��
3D��ӡ�ͺϲ�������ƿ�i�� ���֬�|�{���w�������Fܛ
���֬�|�{���w�������Fܛ 3D��ӡ�z�w�����z��������
3D��ӡ�z�w�����z��������- ���Aʢ�D��W�_�l�ɽ���3D��ӡ�������ϣ�
- ���Ї��W�߰l��3D��ӡ����Nautre������ģ
- ���������I��W�߷���ڣ�FDM��������BST
- ��3D��ӡ�ͺϲ�������ƿ�i����߶�ؐ�~˹
- �����֬�|�{���w�������Fܛ���LЧ���棬
- ��3D��ӡ�z�w�����z����������� ��׃��
- ��˹̹����W�Fꠣ�����չ������ˮ���z
- ������3D��ӡ����ȼ����ȼ���ϲ���
- ����ɫ3D��ӡ���Ľ�B
- ��Axtra3D�����cAdditive Plus���������P
 nano3Dprint�l��
nano3Dprint�l�� 3D Systems�Ƴ�Ne
3D Systems�Ƴ�Ne 3D��ӡ���ߏ��{��
3D��ӡ���ߏ��{�� UCLA��С����ڣ�
UCLA��С����ڣ� ������о����аl
������о����аl Nature�l��ZrO2-S
Nature�l��ZrO2-S

