���w���������S�Y���C���˳����ϵ��OӋ�c��ӡ
�r�g��2023-03-22 10:12 ��Դ��������ͨ��W ���ߣ�admin ��x����
�F��C���˼��g�ѳɞ�Cе���̡�Ӌ��C���Ԅӿ��Ƶȶ����I���о��ğ��T�������y������ӡ������Ӻ�Һ�����Ƶȼ��g�ںܶ����È����¾��в��ɱ���ľ����ԣ����Ŀǰ�о��ˆT���������_�l�µ��ӺͿ��Ʒ�ʽ��������������ڙC����ϵ�y�����\�ӵ�һ�N��;������ͨ�^늈���늺ɵ����̖�͑�׃���\����̖��D�Q�ķ�ʽ���F�ӣ��ڪMС���g̽�y���I��������@�ă��ݡ�
Ŀǰ�������������Ȼ�h���¾��w�Y�������ƣ������ڸ���������늈�푑��đ�׃��ͬ���y�Ԍ��F�����ɶȵ�׃�κ��\�ӣ��Ķ��ڑ������������y�ȣ��������켼�g���M��ʹ�OӋ���S�Y���Ĵ̼�푑����ϳɞ���ܣ��c�T����С��ӺͿ��Ƶȹ��ܾo�ܼ��ɵ�����ϵ�y��ͬ��ͨ�^�������쌍�F�ĽY�����Ͼ���ǰ��δ�е�ϵ�y���s�ԡ������������၆��W Zheng Xiaoyu�F�[1]ͨ�^�������켼�g�OӋ��һϵ������·�����Ԅ���һ��܉��Զ������ɶ��\�ӣ���Ҏ������đ�׃�ŴĶ����F�������Ҹ�֪�ͷ������Ƶľ����\�ӡ�
���ԭ���OӋ
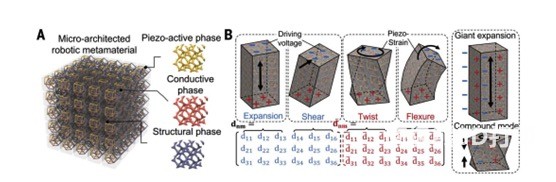
�Y�����ϵĺ��ĸ����nj����ϲ������Ƶط��������S�����ؓ��У��@�^��Ȼ���w���е����ơ��о���������һ�N���ԁ������S���g�И�����늡���늺ͽY���ࣨ��D1��ʾ�����@�N����Ϙ��ɵij������܉����ݔ��늈���ݔ��������κΑ�׃ģʽ����������׃�����Б�׃��Ť�D�͏���ģʽ�Լ������ĽM�ϺͷŴ�ͨ�^����ƽ������D��������늲�����늈��µ�Ť����B����Ԫ�ȉ��֧���ľֲ���׃���oՓ����Û߀���տs������֧���ķ��O����늈��Q����֮���֧�������ڿ��g�����У����ֲ��đ�׃�cȫ���\����������
�C���˳����ϵ���������
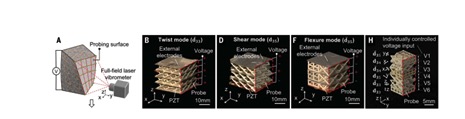
���߈F�ͨ�^����ϵ��������켼�g������ࡢ�Y����͌����M�b�ɏ��s�����S�Y�������Ȍ���ؓ늺ɵĘ�֬��ؓ�d�ļ{�������z�w�x���Եس��e��ƽ�_�ϣ��D2A����Ȼ������x���Եس��e����֬�ϣ��γɎ������w�Y����늘O���D2B����Ȼ���ڸߜ���ͨ�^��늈�ͨ�^���e�Ľ���ʹ�Y���ĉ���մ��O�����D2E�����O����δ��늘O���w�ą^��δ�O���Ġ�B�����������Y���ࡣ�������մ���̼����Ҳ��������Y���࣬����߳����ϵĄ��ȡ��@�N���췽ʽ���F�˾��_���Ϳ�϶�ʺ��߶ȽY�����b��Ќ�늽��ٲ����Љ�����Ե�3D�մɾ���

�ɳ�����Ƶđ�׃�Ϳɸ�֪���͙C����
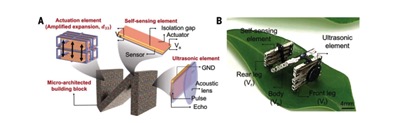
ͨ�^Ƕ��늘O���Y�������߈F���ʾ��ͨ�^�ֲ�늘O���Y���OӋ���F�đ�׃�Ŵ�׃�ͺϺ͑�׃�Ӝp����D3��ʾ���C���˿�ͨ�^�扺�Ч�����F�\�ӣ�ͨ�^���Ч�����F�������ܲ�ͨ�^�ⲿ�O�y��̖���F�������ơ�
�����_�l�ĉ���������ԣ����ߌ��������ģ�K�M�b���\�ӽY�����D4����ԓ�Y�����Ԍ��F�������Ƅӣ���֪�܇��h��׃���������m��������ԓ�Y�����F�����ڂ��y��늲��ϵĉ�����ԡ��ڼ����˳���ģ�K֮���͙C�����܉������ؙz�y�ϵK���Ҍ�ʩ���ϲ������Ķ����F�����Q�ߡ��@��о�ͨ�^���µ����ܽY���OӋ�����������܂��С�����̽�y�͙C�������ܿ��Ƶȷ�������ͻ�ơ�
�����īI��
H. Cui, D. Yao, R. Hensleigh, H. Lu, A. Calderon, Z. Xu, S. Davaria, Z. Wang, P. Mercier, P. Tarazaga, X. Zheng, Design and printing of proprioceptive three-dimensional architected robotic metamaterials, Science 376(6599) (2022) 1287-1293.
Ŀǰ�������������Ȼ�h���¾��w�Y�������ƣ������ڸ���������늈�푑��đ�׃��ͬ���y�Ԍ��F�����ɶȵ�׃�κ��\�ӣ��Ķ��ڑ������������y�ȣ��������켼�g���M��ʹ�OӋ���S�Y���Ĵ̼�푑����ϳɞ���ܣ��c�T����С��ӺͿ��Ƶȹ��ܾo�ܼ��ɵ�����ϵ�y��ͬ��ͨ�^�������쌍�F�ĽY�����Ͼ���ǰ��δ�е�ϵ�y���s�ԡ������������၆��W Zheng Xiaoyu�F�[1]ͨ�^�������켼�g�OӋ��һϵ������·�����Ԅ���һ��܉��Զ������ɶ��\�ӣ���Ҏ������đ�׃�ŴĶ����F�������Ҹ�֪�ͷ������Ƶľ����\�ӡ�
���ԭ���OӋ
�Y�����ϵĺ��ĸ����nj����ϲ������Ƶط��������S�����ؓ��У��@�^��Ȼ���w���е����ơ��о���������һ�N���ԁ������S���g�И�����늡���늺ͽY���ࣨ��D1��ʾ�����@�N����Ϙ��ɵij������܉����ݔ��늈���ݔ��������κΑ�׃ģʽ����������׃�����Б�׃��Ť�D�͏���ģʽ�Լ������ĽM�ϺͷŴ�ͨ�^����ƽ������D��������늲�����늈��µ�Ť����B����Ԫ�ȉ��֧���ľֲ���׃���oՓ����Û߀���տs������֧���ķ��O����늈��Q����֮���֧�������ڿ��g�����У����ֲ��đ�׃�cȫ���\����������
�D1 �����ϵđ�׃ģʽ�OӋ
�C���˳����ϵ���������
���߈F�ͨ�^����ϵ��������켼�g������ࡢ�Y����͌����M�b�ɏ��s�����S�Y�������Ȍ���ؓ늺ɵĘ�֬��ؓ�d�ļ{�������z�w�x���Եس��e��ƽ�_�ϣ��D2A����Ȼ������x���Եس��e����֬�ϣ��γɎ������w�Y����늘O���D2B����Ȼ���ڸߜ���ͨ�^��늈�ͨ�^���e�Ľ���ʹ�Y���ĉ���մ��O�����D2E�����O����δ��늘O���w�ą^��δ�O���Ġ�B�����������Y���ࡣ�������մ���̼����Ҳ��������Y���࣬����߳����ϵĄ��ȡ��@�N���췽ʽ���F�˾��_���Ϳ�϶�ʺ��߶ȽY�����b��Ќ�늽��ٲ����Љ�����Ե�3D�մɾ���
�D2 �C���˳����ϵ�����
�ɳ�����Ƶđ�׃�Ϳɸ�֪���͙C����
ͨ�^Ƕ��늘O���Y�������߈F���ʾ��ͨ�^�ֲ�늘O���Y���OӋ���F�đ�׃�Ŵ�׃�ͺϺ͑�׃�Ӝp����D3��ʾ���C���˿�ͨ�^�扺�Ч�����F�\�ӣ�ͨ�^���Ч�����F�������ܲ�ͨ�^�ⲿ�O�y��̖���F�������ơ�
�D3 �����ɶȵđ�׃�Ŵ�Ϳɾ��̵đ�׃����
�����_�l�ĉ���������ԣ����ߌ��������ģ�K�M�b���\�ӽY�����D4����ԓ�Y�����Ԍ��F�������Ƅӣ���֪�܇��h��׃���������m��������ԓ�Y�����F�����ڂ��y��늲��ϵĉ�����ԡ��ڼ����˳���ģ�K֮���͙C�����܉������ؙz�y�ϵK���Ҍ�ʩ���ϲ������Ķ����F�����Q�ߡ��@��о�ͨ�^���µ����ܽY���OӋ�����������܂��С�����̽�y�͙C�������ܿ��Ƶȷ�������ͻ�ơ�
�D4�̼�푑��Ķ�ģ�B�Ƅ��͙C����
�����īI��
H. Cui, D. Yao, R. Hensleigh, H. Lu, A. Calderon, Z. Xu, S. Davaria, Z. Wang, P. Mercier, P. Tarazaga, X. Zheng, Design and printing of proprioceptive three-dimensional architected robotic metamaterials, Science 376(6599) (2022) 1287-1293.
(؟�ξ���admin)

��һƪ��Jabil��KAV Sports�ö���3D��ӡ���ϸ�׃������܇�^�����췽ʽ
��һƪ��Czinger��Xtrac�����a�˘I�����ؓ䃞����3D��ӡ׃���䣬�Q���r�gС��100����
��һƪ��Czinger��Xtrac�����a�˘I�����ؓ䃞����3D��ӡ׃���䣬�Q���r�gС��100����
 Xenia�M܊�������������
Xenia�M܊������������� �о��ˆT����3D��ӡ��ģ��
�о��ˆT����3D��ӡ��ģ�� ����Brooks�c���պ����_�l
����Brooks�c���պ����_�l ��AHM����3D��ӡ�黼�߶�
��AHM����3D��ӡ�黼�߶� MB Therapeutics�cLynxter
MB Therapeutics�cLynxter ��������������ʹ��3D��ӡ
��������������ʹ��3D��ӡ������
- ��Xenia�M܊��������������Ј����{�誚
- ���о��ˆT����3D��ӡ��ģ���_�l��������
- ������Brooks�c���պ����_�l�����ܸ���3D
- ����AHM����3D��ӡ�黼�߶��ơ�һ��һ��
- ��MB Therapeutics�cLynxter�������Ƴ��
- ����������������ʹ��3D��ӡ����߳�����
- ��HYP3D�Ŀ�����մ�3D��ӡ���a�߉����
- ���Ĵ����������������Ƅ�iLAuNCH�Ŀ��
- ��Restor3dʹ��Formlabs 3D��ӡ�턓����
- ������3D��ӡˮ���z��������������
 ������܊���M3Dɰ
������܊���M3Dɰ 3D��ӡ���Ի�����
3D��ӡ���Ի����� �����ݿ����tԺ��
�����ݿ����tԺ�� ��ʿ�m�Ƽ���W3D
��ʿ�m�Ƽ���W3D ȫ��3D��ӡ������
ȫ��3D��ӡ������ PSAS�ɹ��l��3D��
PSAS�ɹ��l��3D�����c����
- ��HueForge���Sˇ�g��ʹ��3D��ӡ��������
- ��15��3D��ӡ����܊���ð���
- ����ȿ��Y��2021���Ї����պ����I��3D��
- ��ģ��3D��ӡ����������ģ�����p��һ�w��
- ������Brooks�c���պ����_�l�����ܸ���3D
- ������ʿ��3D��ӡܛ�����ڟo�̺۵Ķ�����
- ����������W�����صĶ��3D��ӡֲ�����O
- ������߀��FDM��ӡ���������о��ˆT����
- ����AHM����3D��ӡ�黼�߶��ơ�һ��һ��
- ���P�cȫ�����̘I����3D��ӡ�g�ں���


